Autonomous Robots CampLevel: Outreach
Overview: This program is for students to expand their knowledge and awareness of the aviation and aerospace industry. Students will encounter scientific principles such as lift, thrust, drag, and propulsion. The use of UAS simulators will expose campers to new technologies and the use of other technological devices in the camp will prepare them for advancing technologies in the general workforce. Further info is available following this link. |

|
Presentation: Within the framework of this outreach activity, our lab provided the following presentation.
Open-Source Tools: For K-12 students to further experiment and work on their own ideas, a fully function virtual machine environment that integrates the RotorS Simulator is provided and can be downloaded following this link. You will need to employ some virtual machine managing software such as virtualbox (many other options also exist). Please follow this dedicated page for further information.
How do I get involved? For K-12 students that have very keen interest, you can volunteer to participate in one of the following projects. These projects correspond to university student work that will be carried out duringthe Fall 2016 semester.
|
Project #4: Aerial Robotics for Nuclear Site Characterization
Description: A century of nuclear research, war and accidents created a worldwide legacy of contaminated sites. Massive cleanup of that nuclear complex is underway. Our broad research goal is to addresses means to explore and rad-map nuclear sites by deploying unprecedented, tightly integrated sensing, modeling and planning on small flying robots. Within this project in particular, the goal is to develop multi-modal sensing and mapping capabilities by fusing visual cues with thermal and radiation camera data alongside with inertial sensor readings. Ultimately, the aerial robot should be able to derive 3D maps of its environment that are further annotated with the spatial thermal and radiation distribution. Technically, this will be achieved via the development of a multi-modal localization and mapping pipeline that exploits the different sensing modalities (inertial, visible-light, thermal and radiation camera) in a synchronized and complimentary fashion. Finally, within the project you are expected to demonstrate the autonomous multi-modal mapping capabilities via relevant experiments using a multirotor aerial robot. Collaborators: Nevada Advanced Autonomous Systems Innovation Center - https://www.unr.edu/naasic Budget: $2,000 
Project #3: Aerial Robotics for Climate Monitoring and Control
Description: Within that project you are requested to develop an aerial robot capable of environmental monitoring. In particular, an “environmental sensing pod” that integrates visible light and multispectral cameras, GPS receiver, and inertial, atmospheric quality, as well as temperature sensors. Through appropriate sensor fusion, the aerial robot should be able to estimate a consistent 3D terrain/atmospheric map of its environment according to which every spatial point is annotated with atmospheric measurements and the altitude that those took place (or ideally their spatial distribution). To enable advanced operational capacity, a fixed-wing aerial robot should be employed and GPS-based navigation should be automated. Ideally, the aerial robot should be able to also autonomously derive paths that ensure sufficient coverage of environmental sensing data. Collaborators: Desert Research Institute - https://www.dri.edu/ Budget: $2,000 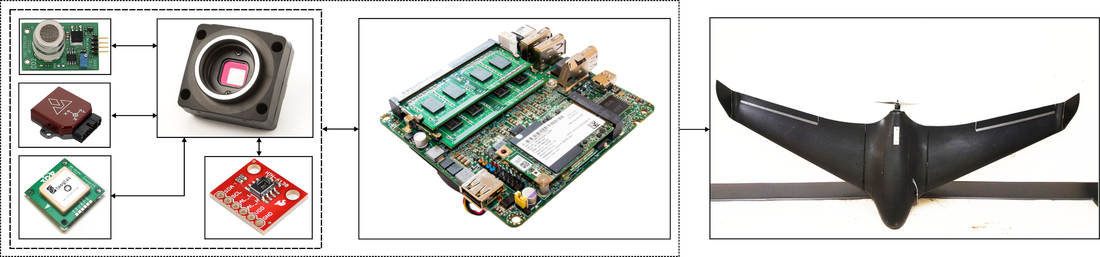
Project #2: Robots to Study Lake Tahoe!
Description: Water is a nexus of global struggle, and increasing pressure on water resources is driven by large-scale perturbations such as climate change, invasive species, dam development and diversions, pathogen occurrence, nutrient deposition, pollution, toxic chemicals, and increasing and competing human demands. These problems are multidimensional and require integrative, data-driven solutions enabled by environmental data collection at various scales in space and time. Currently, most ecological research that quantifies impacts from perturbations in aquatic ecosystems is based on (i) the collection of single snapshot data in space, or (ii) multiple collections from a single part of an ecosystem over time. Ecosystems are inherently complex; therefore, having access to these relatively coarse and incomplete collections in space and time could result in less than optimal data based solutions. The goal of this project is to design and develop a platform that can be used on the surface of a lake to quantify the water quality changes in the nearshore environment (1-10 m deep). The platform would be autonomous, used to monitor the environment for water quality (temperature, turbidity, oxygen, chl a) at a given depth. Collaborators: Aquatic Ecosystems Analysis Lab: - http://aquaticecosystemslab.org/ Budget: $2,000
Project #1: Ground Robots for Hostile Environment Monitoring
Description: Critical operations such as nuclear site monitoring, search and rescue missions, or risk assessment missions after a failure event in oil and gas infrastructure take place within hostile environments. In such cases, we need robotic systems capable of seamlessly accessing and navigating these areas, enduring their harsh conditions and collecting and processing critical data such that the human operators can have a hollistic understanding of the situation. Within this project, the goal is to develop a ground robot with advanced terrain traversability capabilities through the intelligent combination of a multi--degrees of freedom chasis, advanced steering and guidance control, as well as real--time 3D mapping to then enable intelligent motion planning. Collaborators: Internal project Budget: $2,000 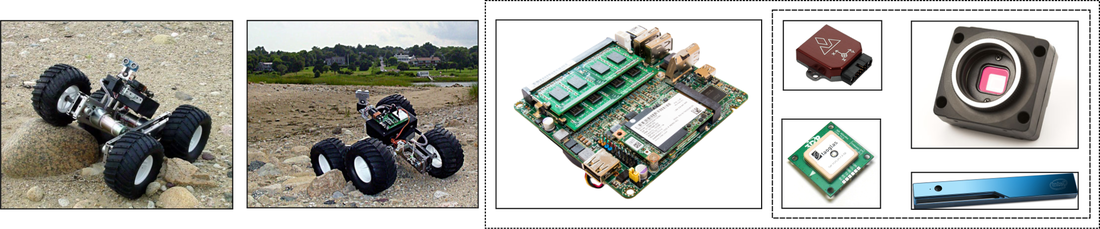
|




|


Study links• Python/MATLAB examples for aerial robotics: check each section of the Online Textbook
• Proposed literature |
Open-Source Code• RotorS Simulator: https://github.com/ethz-asl/rotors_simulator
• Structural Inspection Path Planning: https://github.com/ethz-asl/StructuralInspectionPlanner • Receding Horizon Next-Best-View Planner: https://github.com/ethz-asl/nbvplanner |
More• Check our course on Aerial Robotics
• Check this course on Unmanned Aerial Systems at ETH Zurich • Check this course on Aircraft Stability and Control from MIT • Check this great open-source project on autopilot design: https://pixhawk.org/ |