Introduction to Aerial RoboticsLevel: CS491/CS691
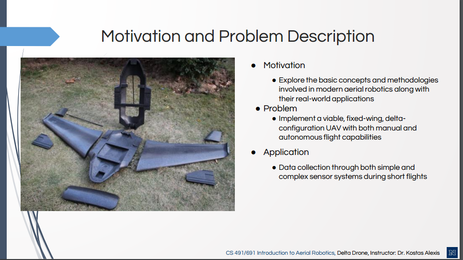
Overview: This course aims to introduce students (from Computer Science, Electrical Engineering and Mechanical Engineering) to the concepts of unmanned aircraft modeling, state estimation, control, as well as into the very basics of motion planning. In particular we will derive the models of unmanned rotorcraft, introduce the concepts of Kalman Filtering for linear and nonlinear systems, methods for closing the loop with stability analysis as well as basic algorithms that robots can employ to efficiently navigate in their environment. The final section of the course is about the collective design - first of all in the classroom - of the algorithms that enable an aerial vehicle to become an autonomous aerial robot. This effort is supported by an open-source simulation and the students will have the opportunity to implement their designs and ideas. 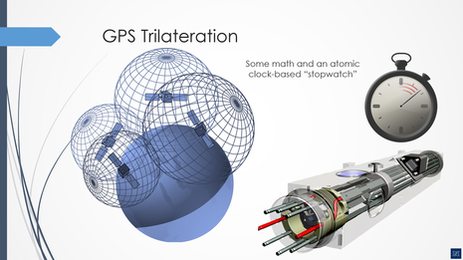
|


|
The course is divided into the following sections:
The study material will contain:
Student projects:
Significant component of the course load will be related with the accomplishment of a semester-long project with one intermediate presentation and a final report and presentation. Indicative project examples can be found in the following link:
Interested in doing a project in Aerial Robotics? Check the "Student Projects" section and send an e-mail to: [email protected]
- Section 1: Modeling of the flight dynamics of an aerial robot
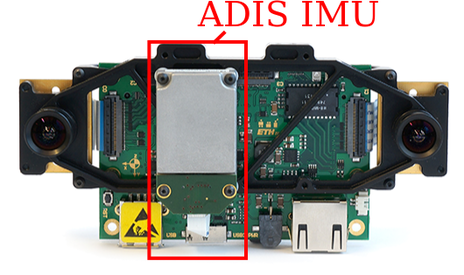
- Section 2: State estimation, the role of each sensor and estimation of the vehicle full pose
- Section 3: Flight controls for rotorcraft and fixed-wing aerial robot configurations
- Section 4: Motion planning for the autonomous navigation of an aerial robot
- Section 5: Case study: modeling and control of a multirotor Micro Aerial Vehicle (MAV)
The study material will contain:
- Slides that support the course lectures
- An Online Textbook with a more comprehensive overview of specific topics.
- Relevant simplified Python and MATLAB examples found as part of the Online Textbook.
- The RotorS Open-Source simulator developed at the Autonomous Systems Lab at ETH Zurich.
- Proposed books and further literature.
Student projects:
Significant component of the course load will be related with the accomplishment of a semester-long project with one intermediate presentation and a final report and presentation. Indicative project examples can be found in the following link:
Interested in doing a project in Aerial Robotics? Check the "Student Projects" section and send an e-mail to: [email protected]
|
|
|
Study links• Lecture slides - TBA
• Online Textbook • Python/MATLAB examples: check each section of the Online Textbook • Proposed literature |
Open-Source Code• RotorS Simulator: https://github.com/ethz-asl/rotors_simulator
• Structural Inspection Path Planning: https://github.com/ethz-asl/StructuralInspectionPlanner |
More• Check this course on Aircraft Stability and Control from MIT
• Check this great open-source project on autopilot design: https://pixhawk.org/ |