Undergraduate Researchers Needed!
At the Autonomous Robots Lab, we are working on the following prioritized projects - for which we are seeking for new undergraduate researchers that would be willing to be involved. This announcement specifically calls for undergrads as we aim for long-term research capacity development within UNR. For all these projects additional post-doc, PhD candidate, and graduate researchers supervision will be provided. For those of you have interested to participate in the relevant research efforts, send an e-mail at: [email protected]
Robots to Study Lake Tahoe!

|
Water is a nexus of global struggle, and increasing pressure on water resources is driven by large-scale perturbations such as climate change, invasive species, dam development and diversions, pathogen occurrence, nutrient deposition, pollution, toxic chemicals, and increasing and competing human demands. These problems are multidimensional and require integrative, data-driven solutions enabled by environmental data collection at various scales in space and time. Currently, most ecological research that quantifies impacts from perturbations in aquatic ecosystems is based on (i) the collection of single snapshot data in space, or (ii) multiple collections from a single part of an ecosystem over time. Ecosystems are inherently complex; therefore, having access to these relatively coarse and incomplete collections in space and time could result in less than optimal data based solutions. The goal of this project is to design and develop a platform that can be used on the surface of a lake to quantify the water quality changes in the nearshore environment (1-10 m deep). The platform would be autonomous, used to monitor the environment for water quality (temperature, turbidity, oxygen, chl a) at a given depth.
In collaboration with: |
|
Autonomous Exploration Mapping and Semantic Understanding
Within this project our goal is to improve the capacity of an aerial robot to explore unknown or partially known environments. Advanced autonomous robots should be able to efficiently explore and maintain sufficient 3D reconstruction fidelity of the newly mapped world. At the same time, intelligent robots should exploit semantic understanding of the world both in order to derive an information rich map but also to bias their planning such that it can focus on elements of the environment that have particular interest. Human beings do so everyday: when exploring a new world, a door is typically a promise for further exploration. When investigating an industrial facility at risk, a gauge indication is of special interest. Our goal is to incorporate such autonomy and intelligence into the next generation of small aerial robotics.
Previous work: |

|
|
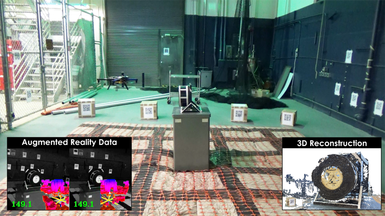
Augmented Reality-enhanced Aerial Robotics
Augmented reality technologies and robotics are one of the key innovations of our time. What about their combination? Through this way, the human user can intuitively guide a robot, focus on the essential, sensed and processed data from the robot and further combine human cognition with robotic autonomy. Through such an innovation, it can be expected that the combined human/robot system will be characterized by unprecedented capacity to cope with sophisticated tasks. In our lab we are particularly focusing on the shared human-robot augmented reality-enhanced cognition for inspection operations.
Previous work: |
|
Fixed-Wing UAV Guidance and Autonomy
When it comes to endurance and capacity to observe large-scale environments for long-term, fixed-wing unmanned aircraft are necessarily the ideal -if not the only- solution. In our lab, we start a new endevaur towards autonomous guidance and novel perception for fixed-wing aerial robots such that they achieve: a) large scale area monitoring and mapping, b) real-time depth understanding and mapping, as well as c) detection of change. At the same time, we aim to enable key operational skills such as autonomous landing as well as navigation in urban landscape (and among buildings). Our fleet currently contains a delta-wing UAV and we plan to further expand to solar systems.
Previous work: |

|

|
Autonomous Cars and Ground-based Robotics
There is no need to say much about the importance of autonomous cars. This corresponds to a new research field for our lab. Our main contribution will be in a coupled perception-planning approach such that the autonomous car can make the best possible action given the -necessarily- not ideal onboard sensing it will have. Among the challenges we would like to contribute into solving, are those of pedestrian detection and avoidance - especially early detection. In our current stage of research, we focus on developing the sensor set-up to be mounted on a normal car, process the data and enable self localization and mapping, and finally work on pedestrian intent recognition. As a next step we will work on the car automation through control and planning.
|

|

|