BadgerWorks
High-risk, High-reward Research for Undergraduates
|
|
What is BadgerWorks? The goal of “BadgerWorks: High-risk Research for Undergraduates” is to develop an undergraduate student-organization for ground-breaking robotics and AI research, an organization tailored to undertaking great challenges and moon-shot projects. BadgerWorks aims to be the place for highly-motivated students to build their skill, the environment in which the most difficult but also most rewarding problems are attempted to be solved. As such, BadgerWorks can have significant impact in the excellence of our University and offers outstanding educational, research and career building experiences.
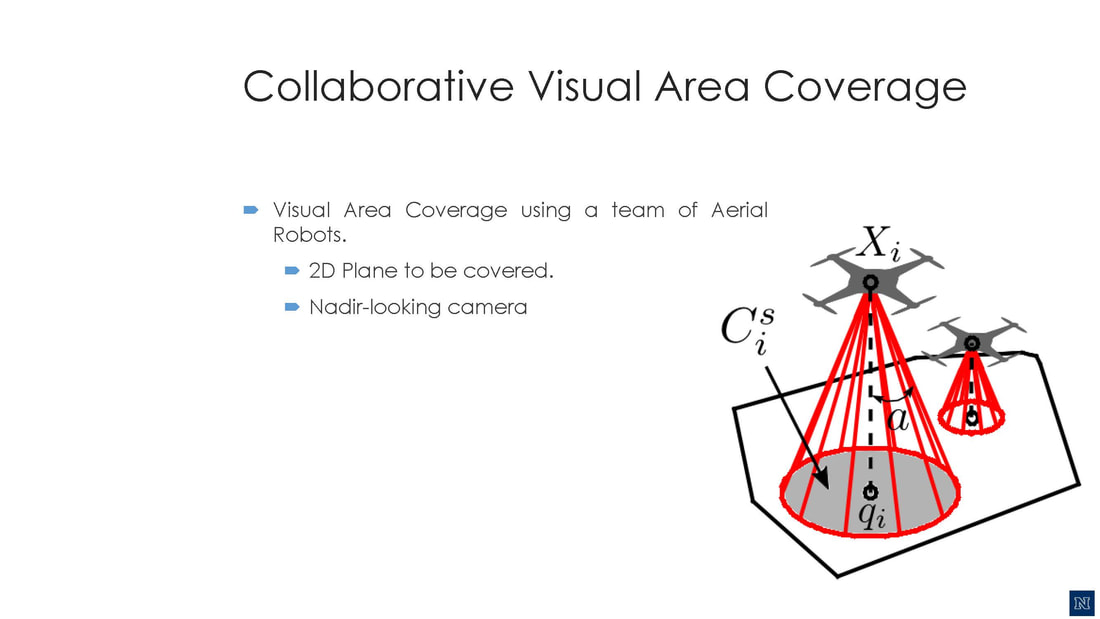
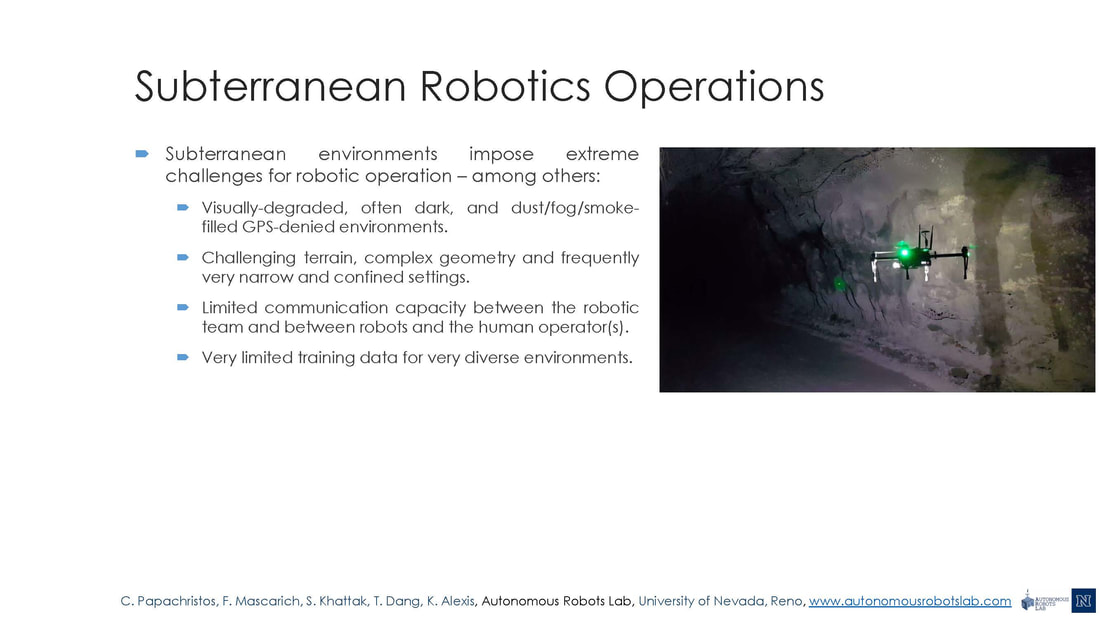
What is BadgerWorks working on? BadgerWorks is organized around thematic long-term moonshot-like projects. Currently, the BadgerWorks activities are organized around one major topic,, namely the development of new concepts for Subterranean Robotics. In that framework we question if we can and what it takes to make robots able to operate autonomously in the underground environment? Can they enter cave networks, explore and map them? Can we develop small robots capable of opening (boring) tunnels and creating complex underground networks much like many animals do? What innovations in vehicle design, sensing, control, planning and reinforcement learning techniques are required? The goal is to assemble a multi-disciplinary team of 5 undergraduates to conduct fundamental research in relation to these problems. Two core milestones are considered, namely that of navigation in cluttered underground cave-type environments and b) the ability of drilling a hole of a size such that the robot can burry itself underground.
"Aardvark" Leg-Wheel Robot
|
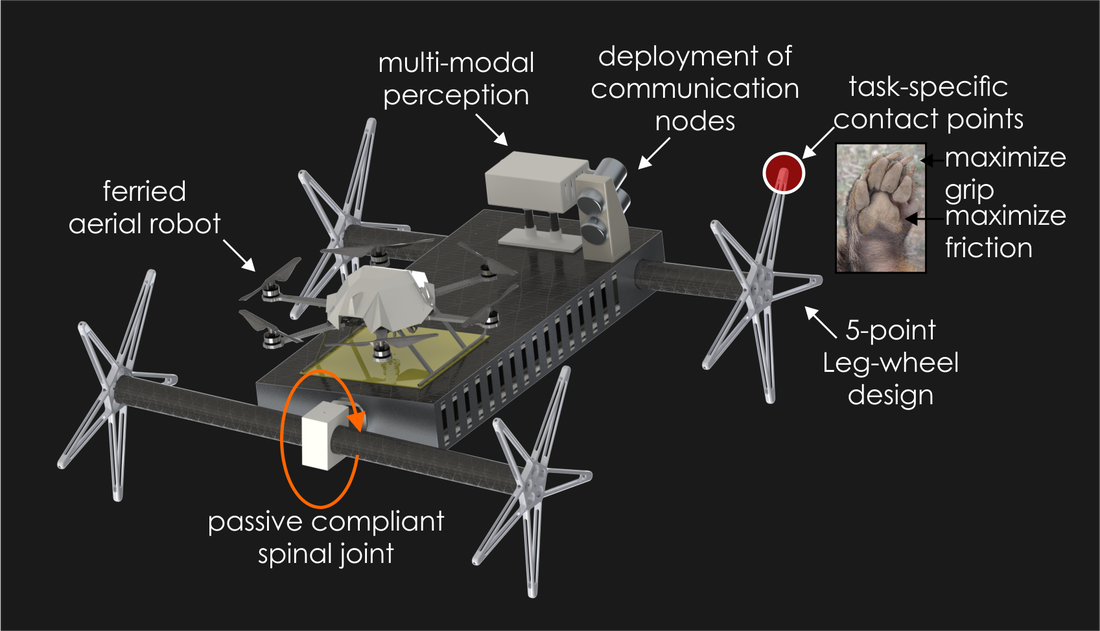
As a first step in that direction we have been working to develop the "Aardvark" Leg-Wheel Robot (LWR). A 3D visualization of the envisioned robotic system is shown on the right, while preliminary results with respect to its ability to climb stairs are shown in the linked video.
In further detail, the Aardvark LWR robot utilizes four independently actuated motors that drive a pentagon-shaped "leg-wheel" and thus is tailored to rough terrain and especially to climb stairs. Aardvark integrates, at its current design, a stereo visual-inertial localization system and a 2D LiDAR system - both interfaced by an onboard Intel i7 processor. The team of students working on Aardvark are currently designing its control law and perform a series of improvements with respect to its design. Furthermore, we seek to deploy a set of machine learning algorithms for automated object detection and then combine this information with the real-time mapping capabilities of the robot to estimate the position of objects in the environment. Finally, we aim to allow Aardvark to ferry a small aerial robot and support its autonomous take-off and landing from its structure. To help us further develop Aardvark, SICK - a LiDAR company - has welcomed our participation in the TiM$10kChallenge which offers the opportunity to students to go after a $10k award given a successful robot design. We invite students to contact us and become members of our team, members of BadgerWorks (either in the role of an undergraduate or a graduate mentor) and thus gain significant experiences and contribute into a challenging robot design. Participation in the project allows to be part of the team that will compete for the $10k student award from SICK, while simultaneously being part of our CERBERUS project for the DARPA Subterranean Challenge. If you have interest, please contact us at [email protected] |
|
How do we work at BadgerWorks? In principle, BadgerWorks emphasizes on the self-organization and knowledge development among students. For that purpose students are encouraged to organize their own lectures, coding workshops, hackathons and other such activities for collaborative knowledge development and sharing of know-how. However, further to this basic direction, students in BadgerWorks are supervised by members of the Autonomous Robots Lab both at the individual and at the team level. In addition, a series of activities are organized by the lab in relation to BadgerWorks including specialized seminars, lab presentations, workshops to explain key robotic methods and software and more.
What resources do we have available? BadgerWorks is hosted at the facilities of the Autonomous Robots Lab at the Applied Research Facility (ARF) building. Members of BadgerWorks have access to a) the Autonomous Robots Arena for comprehensive robot testing and evaluation, and b) the robot development equipment of our lab. You have the benefit of being assigned a dedicated space and the ability to access and use world-class research infrastructure.
How do I get involved? Please send an e-mail at [email protected]. Some of us will meet and discuss with you to get you immediately involved!
Can I combine it with my studies? Yes! Directed and independent studies perfectly fit the scope of work and vision of BadgerWorks. Contact [email protected] to arrange accordingly.
Indicative Student Projects
|
Download a relevant presentation reflecting some activities of our lab (May 2018 - Video)
|
Software to get you started
|
ROS-ready Ubuntu Virtual Machine
|
Repository of Code Examples
|
Study links• Introduction to Aerial Robotics course (UNR). Click here.
• Autonomous Mobile Robot Design course (UNR). Click here. |
Open-Source Code• Code Repository of the Autonomous Mobile Robots Design course. Click here.
• GitHub repositories of the Autonomous Robots Lab. Click here. |
More |
BadgerWorks Knowledge Bank
|
Perception & Estimation
Perception & Estimation #1: Bayesian estimation, Kalman Filter, Extended Kalman Filter
|
|