Lecture Slides
The course teaching relies on a set of slides to support the lectures. Within the lecture, slides-based presentation will often be supported with a code example and discussion on robot design. In particular slides contain the main section with theory presentation, slides for code examples (documented in the slides or indicating that such an example takes place with other means), slides on how this lecture is applied to your project implementation, as well as references to further resources. The following "visual code" is followed:
|
|

|
|
Module 1: Introduction
|
|
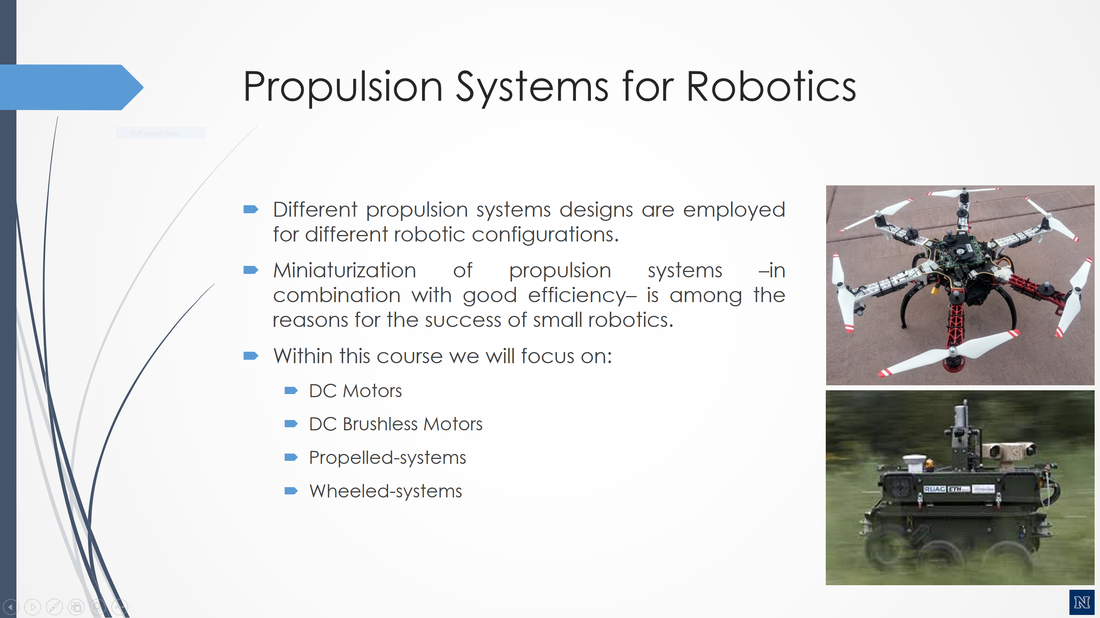
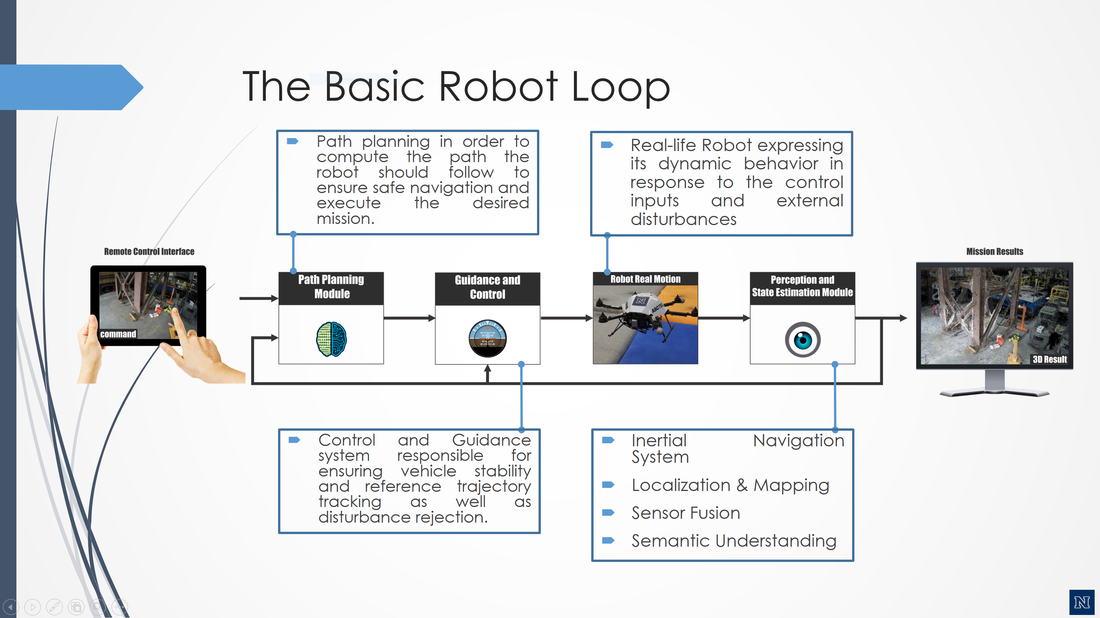
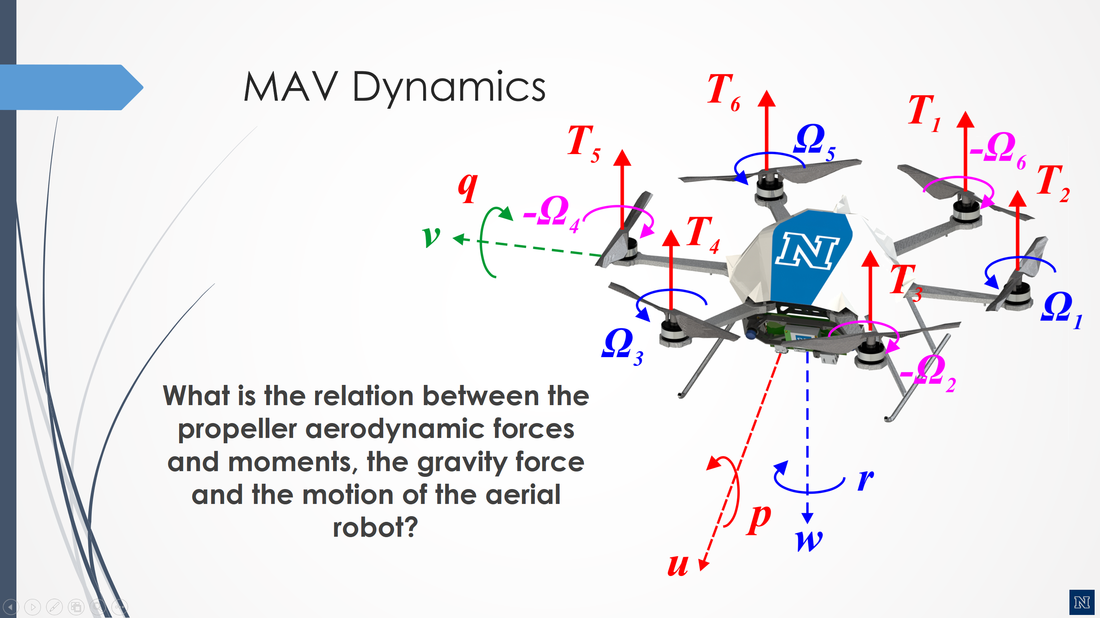
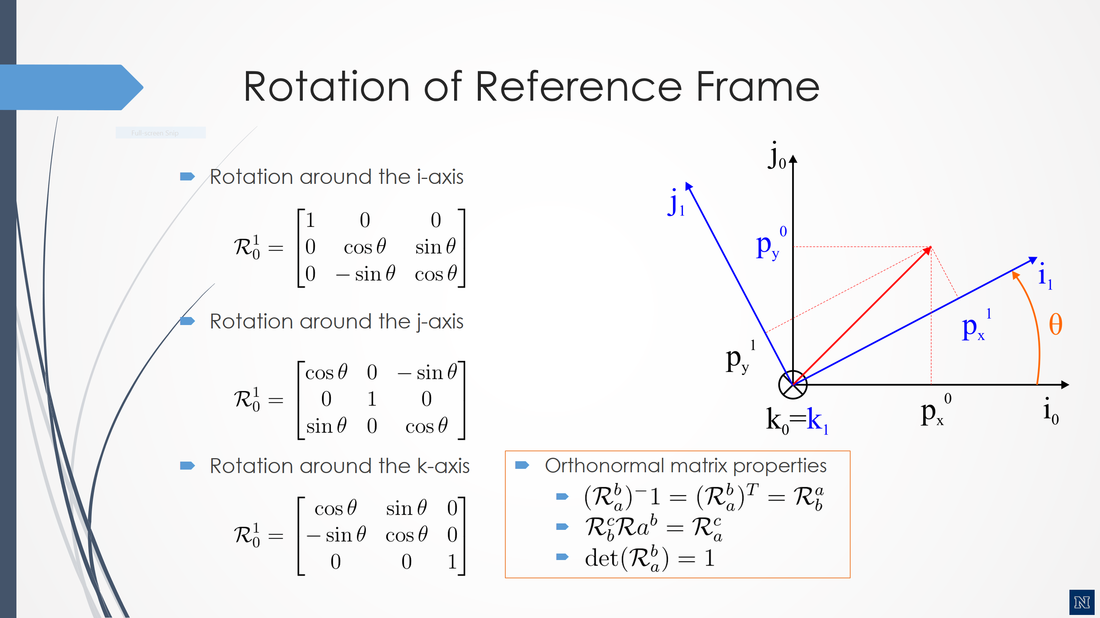
Module 2: Propulsion Systems and Vehicle Dynamics

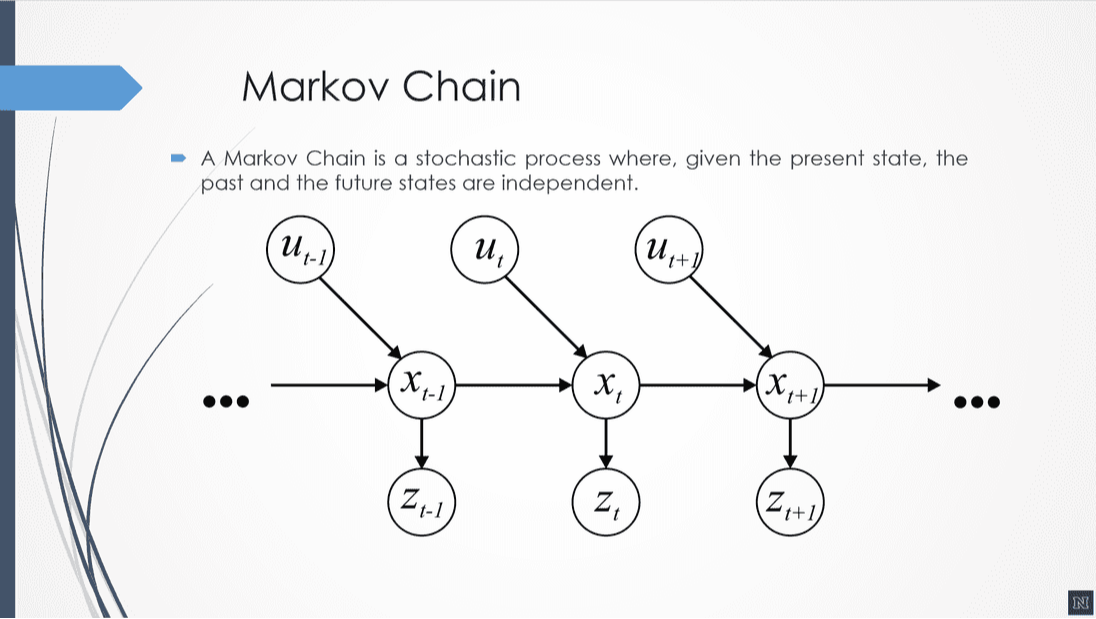
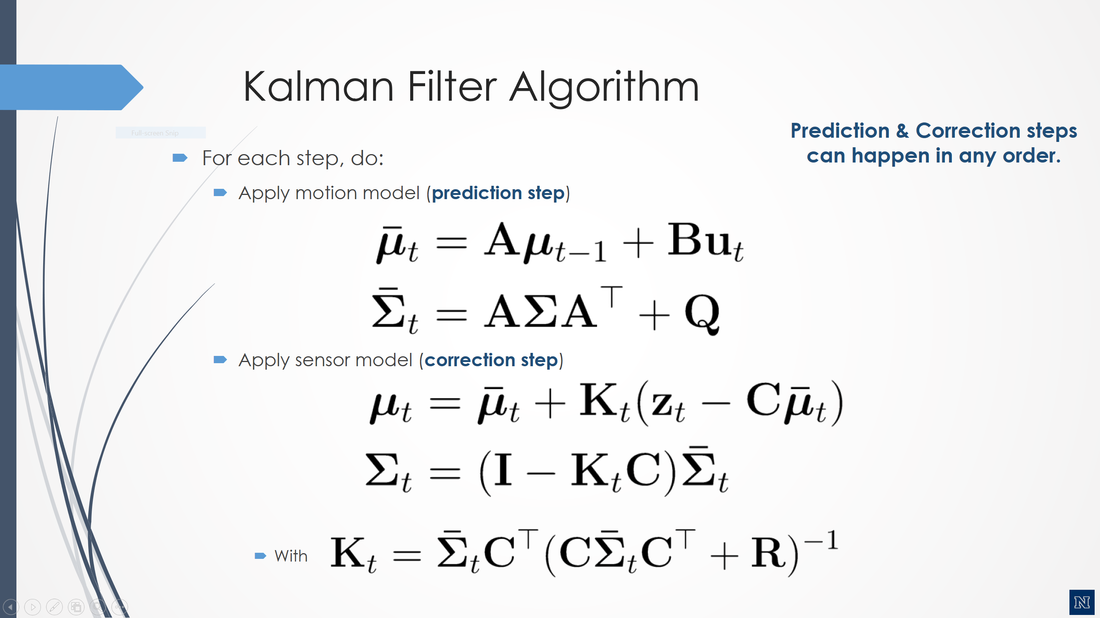
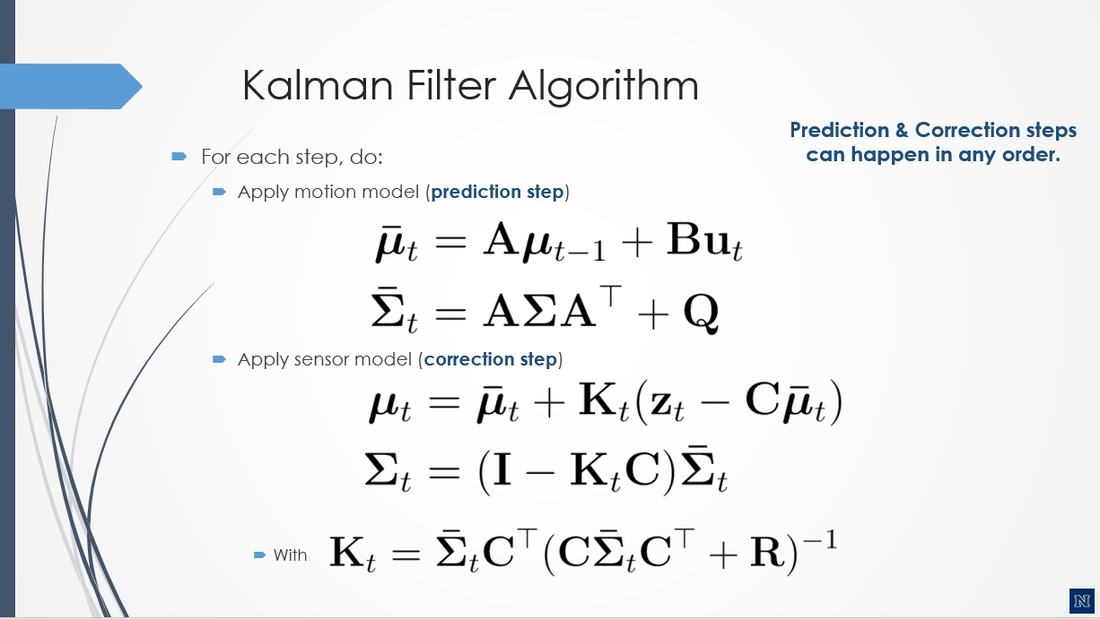
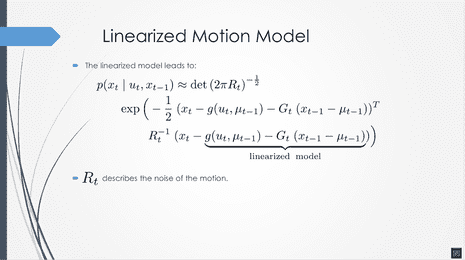
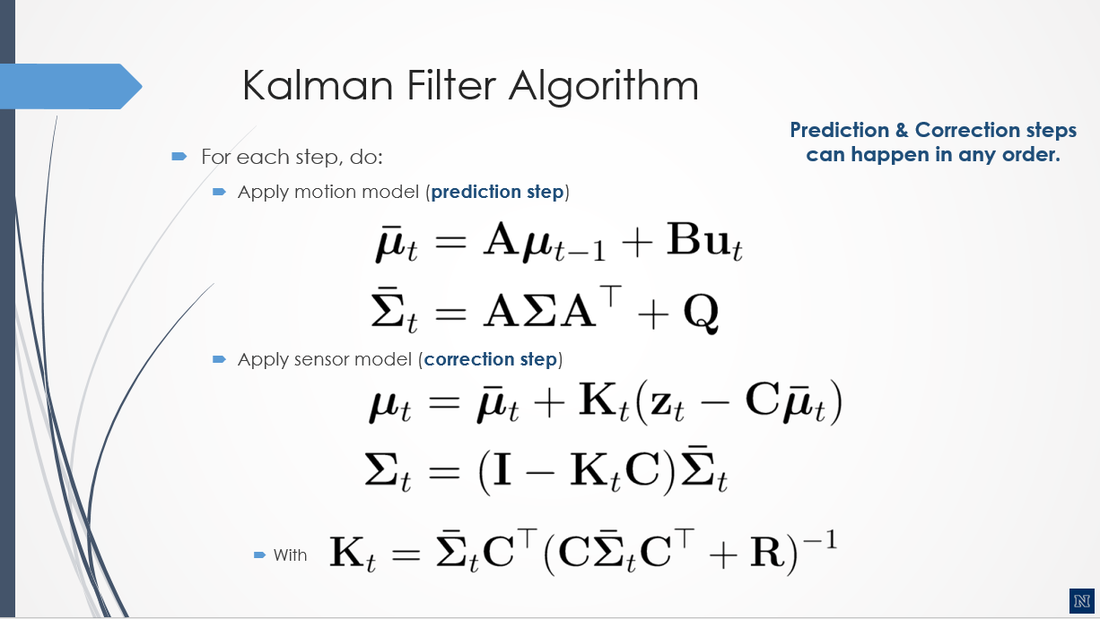
Module 3: State Estimation
Tutorials:
Papers to study: SIFT Matlab example Further links:
Document for homework:
|
Further examples (outside of the course code repository):Software to tryStudent Projects Progress Presentations
|
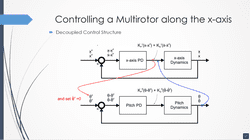
Module 4: Guidance and Control
Advanced Study: |
|
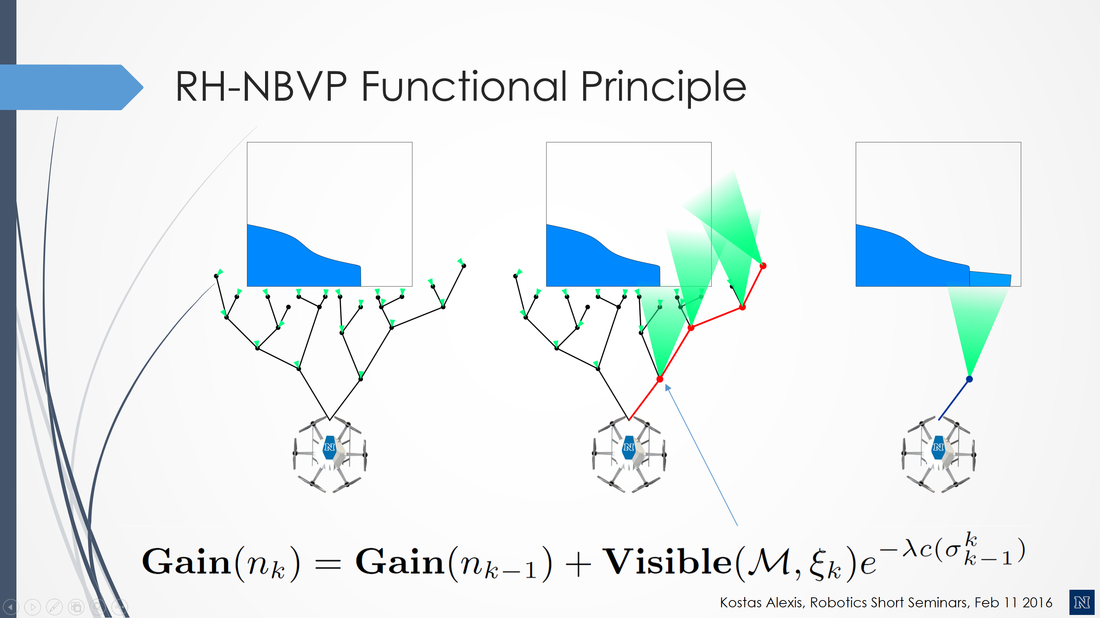
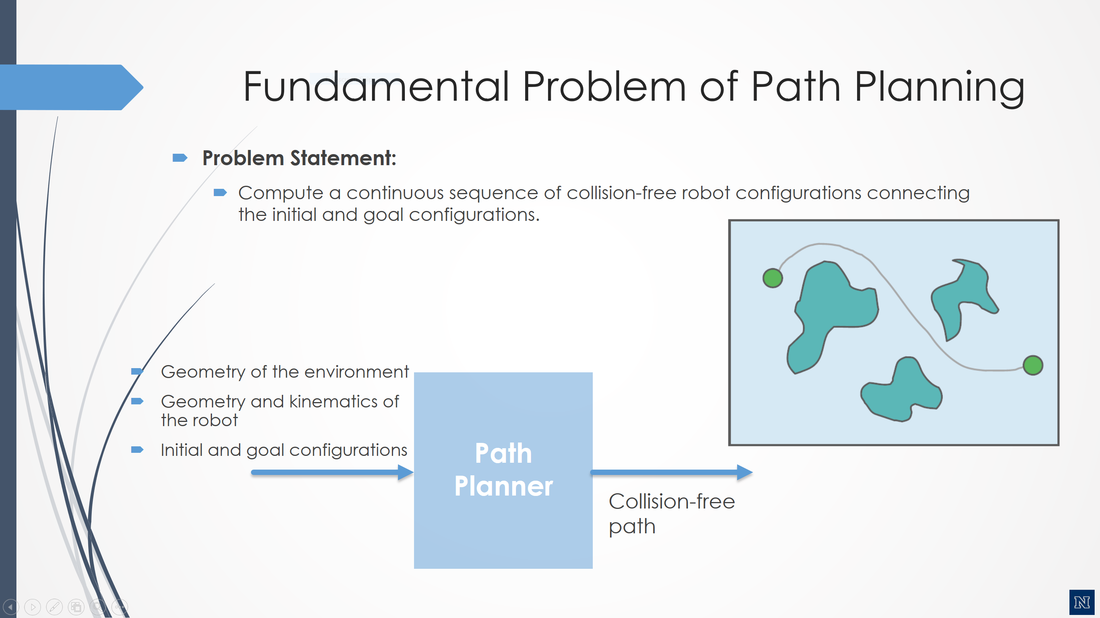
Module 5: Path Planning

The actual lecture will employ slight more enhanced slides. For a better overview please watch the video "Talk on Autonomous Exploration & Mapping using Aerial Robots"
Complete open source toolboxes:
|
MIT - Technical Report on Bidirectional planning. Click here
|