The Drones Demystified! program is under development! A first complete version will be available by September 2017. Please visit this page again.
Course Code Repository
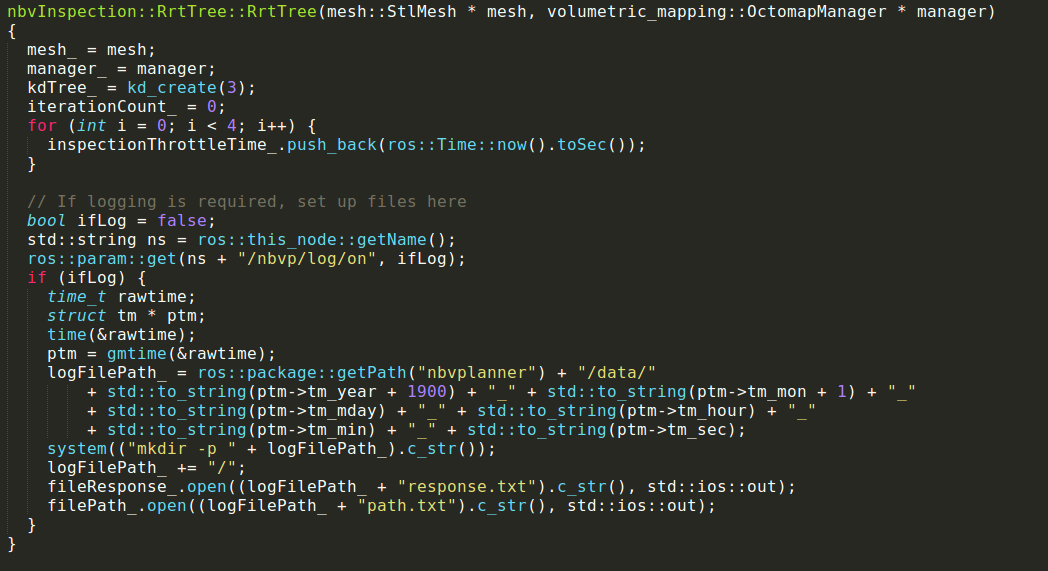
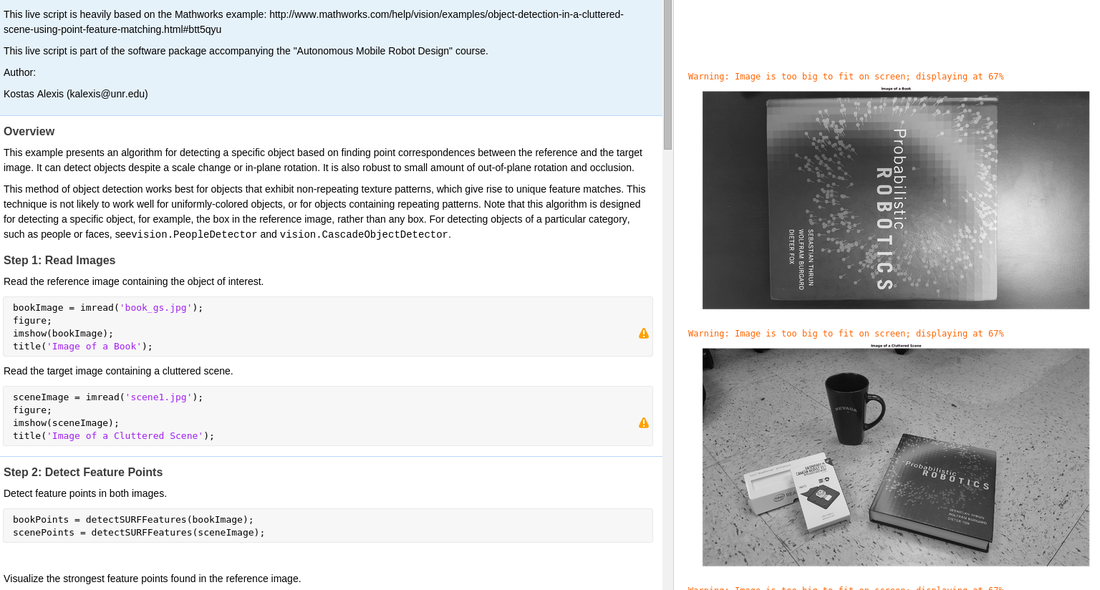
The drones demystified online course is supported with a code repository of examples for a variety of aerial robotic tasks such as control, state estimation, localization and mapping, object detection, path planning and more. The code repository can be found (open access) at: https://github.com/unr-arl/drones_demystified
The repository contains examples in C++, Python, MATLAB as well as indicative ROS launch files etc.
|
|
|