
|
TTK31: Aerial Robotic Autonomy: Methods & SystemsThe course relates to the problem of Resilient Autonomy for Aerial Robots. Topics will cover: T1: Modeling and Control of Micro Aerial Vehicles, T2: State Estimation & Localization And Mapping, T3: Path Planning for Collision-free Flight and Extrinsic Objective Optimization, T4: Data-driven Navigation Policies. The class follows a breadth-first approach followed by deep-dive on one particular topic every year. There is a semester-long research-oriented project in which students work as teams. Coding assignments relate to robot control, state estimation and path planning. Coding takes place in C++ and Python.
|
|
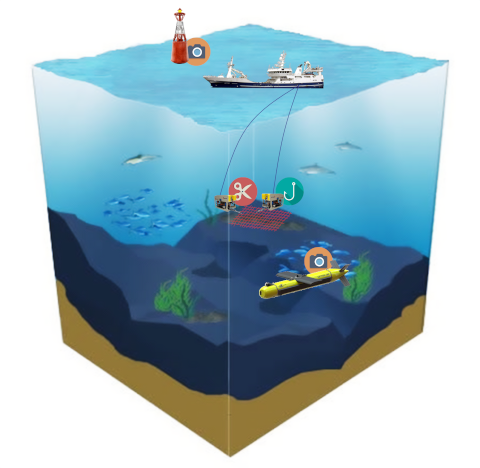
EiT: TTK4854: Robotic Ocean Waste RemovalPollution of the oceans is an ever increasing problem of essential importance with millions of additional plastic pieces entering the world's seas every day. Motivated by this problem, in this "Expert in Teams" village we seek to identify how robotic vessels can be designed and used to autonomously remove plastic waste from our seas and especially across areas where plastic tends to be accumulated. Throughout the semester we aim to identify "hotspots" of pollution, design and prototype a "green" robotic vessel for waste collection and removal, and identify a plan for the utilization of such technologies in Norway and the world.
|
|
|

|
CS491/CS691 Introduction to Aerial RoboticsThis course aims to introduce students (from Computer Science, Electrical Engineering and Mechanical Engineering) to the concepts of unmanned aircraft modeling, state estimation, control, as well as into the very basics of motion planning. The final section of the course is about the collective design - first of all in the classroom - of the algorithms that enable an aerial vehicle to become an autonomous aerial robot. This effort is supported by an open-source simulation and the students will have the opportunity to implement their designs and ideas.
|

|
|
|
|

|
Robotics Short SeminarsThe "Robotics Short Seminars" correspond to a set of biweekly talks that are be provided in order to cover current trends in robotics research. These presentations are very research oriented and students are invited to attend, actively raise their questions, express interest to participate in relevant research efforts, and broadly be proactive.
|

|
Outreach ActivitesOur lab is providing a series of outreach activities. Following this link you will find some of our relevant presentations, demos, education tools and more.
|