Course Code Repository
The course is supported with a code repository of examples for a variety of robotic tasks such as control, state estimation, localization and mapping, object detection, path planning and more. The code repository can be found (open access at the semesters the course is taught) at:
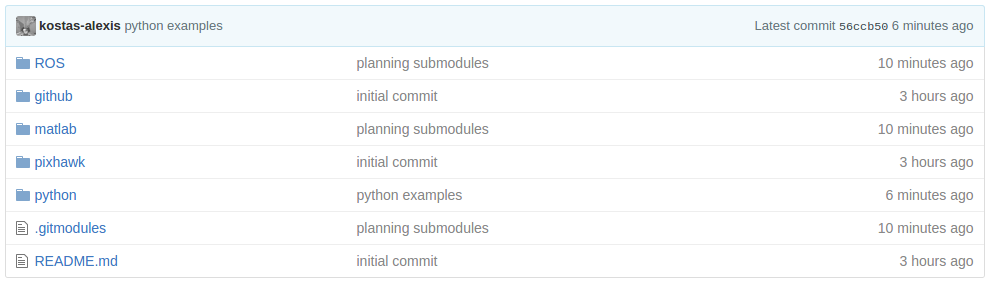
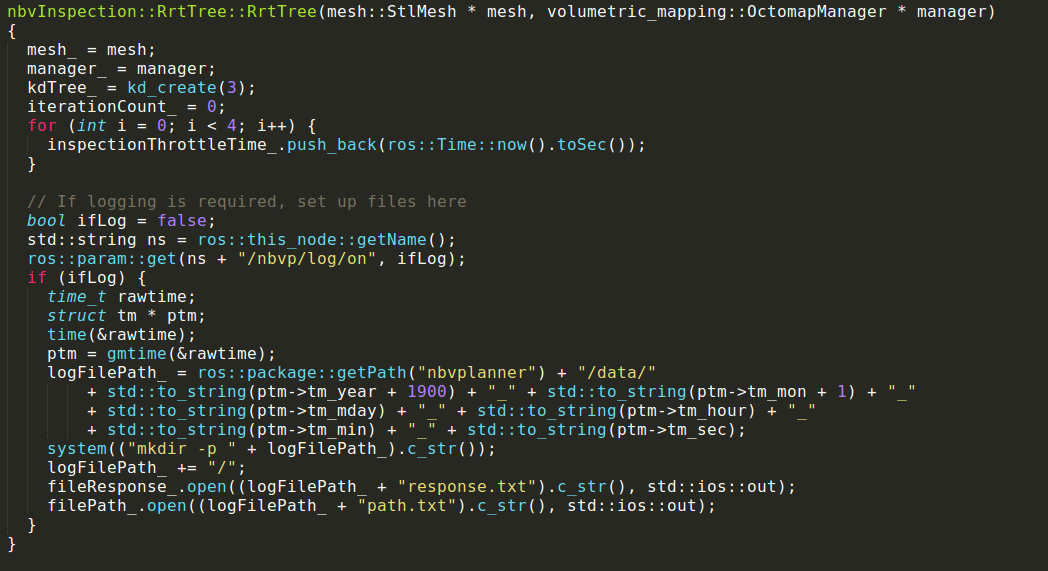
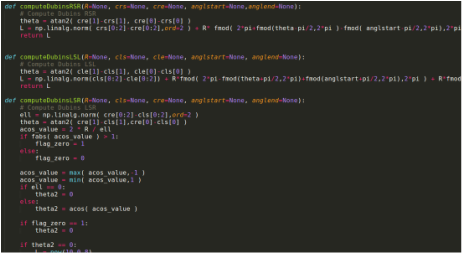
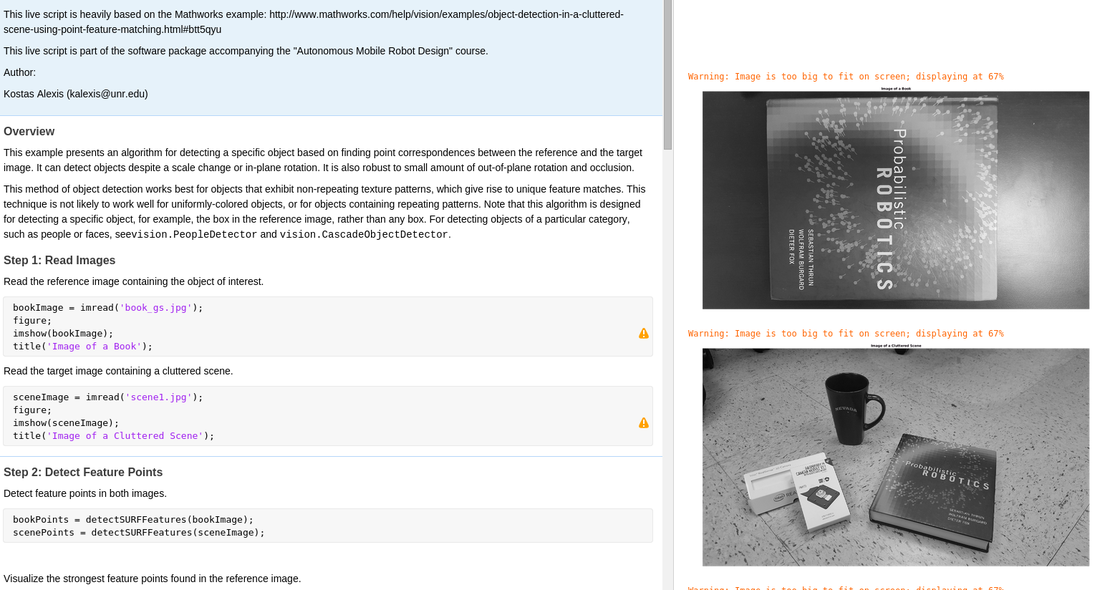
The repository contains examples in C++, Python, MATLAB as well as indicative ROS launch files etc.
|
|
|