|
RotorS SimulatorRotorS is a MAV gazebo simulator developed by the Autonomous Systems Lab at ETH Zurich. It provides some multirotor models such as the AscTec Hummingbird, the AscTec Pelican, or the AscTec Firefly, but the simulator is not limited for the use with these multicopters. There are simulated sensors coming with the simulator such as an IMU, a generic odometry sensor, and the VI-Sensor, which can be mounted on the multirotor. This packages also contains some example controllers, basic worlds, a joystick interface, and example launch files. Below we provide the instructions necessary for getting started. See RotorS' wiki for more instructions and examples (https://github.com/ethz-asl/rotors_simulator/wiki).
|
Download the RotorS-ready Ubuntu VM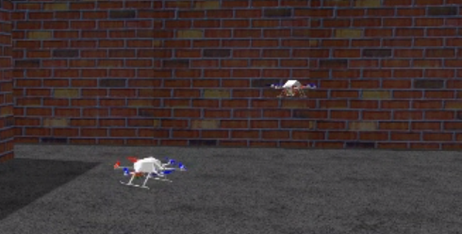
|
RotorS-ready Ubuntu VMA RotorS-ready Virtual Machine has been prepared to give students easy access to the RotorS simulator. To use this Virtual Machine you will neeed:
RotorS-ready Ubuntu VM info
Other issues to consider:
Why RotorS
|
Getting StartedInstallation Instructions |
|
Basic Usage |
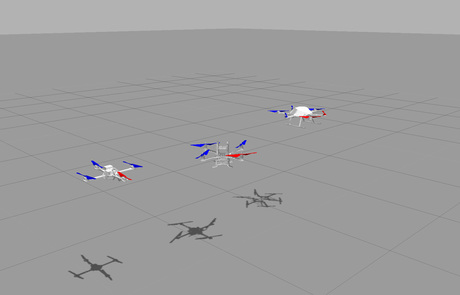
Basic UsageLaunch the simulator with a hex-rotor helicopter model, in our case, the AscTec Firefly.
The simulator starts by default in paused mode. To start it you can either
There are some basic launch files where you can load the different multicopters with additional sensors. They can all be found in Getting the robot to flyTo let the multicopter fly you need to generate thrust with the rotors, this is achieved by sending commands to the multicopter, which make the rotors spin. There are currently a few ways to send commands to the multicopter, we will show one of them here. The rest is documented here in our Wiki. We will here also show how to write a stabilizing controller and how you can control the multicopter with a joystick. Send direct motor commandsWe will for now just send some constant motor velocities to the multicopter.
You should see (if you unpaused the simulator and you have a multicopter in it), that the rotors start spinning. The thrust generated by these motor velocities is not enough though to let the multicopter take off.
Let the robot hover with ground truth odometryYou can let the helicopter hover with ground truth odometry (perfect state estimation), by launching: |
Contact |
UNR students that have scientific questions about RotorS contact Dr. Kostas Alexis. If you are interested in contributing in the further development of RotorS then:
|