Drones Demystified!Drones Demystified is an outreach education program created with the support of IEEE RAS CEMRA. Our goal is to provide a continuously updated and upgraded educational material that can allow inexperienced students and enthusiasts to learn and be able to develop aerial robotic systems!
|
|
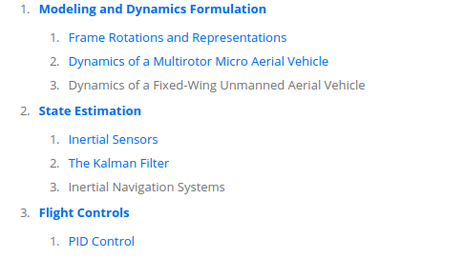

Study links |
Open-Source Code• RotorS Simulator: https://github.com/ethz-asl/rotors_simulator
• Structural Inspection Path Planning: https://github.com/ethz-asl/StructuralInspectionPlanner |
More• Check this course on Aircraft Stability and Control from MIT
• Check this great open-source project on autopilot design: https://pixhawk.org/ |