Lecture Slides
In combination with the online textbook, the course relies on a set of slides to support the lectures. Those will be progressively uploaded before each class and can be found below.
errata: corrected equations - slides 24,25,26
Advanced Study:
*errata: corrected equation of control allocation matrix - slides 19,20,21
Additional Course Modules 2018
|
errata: corrected equations - slides 34,45,36,37
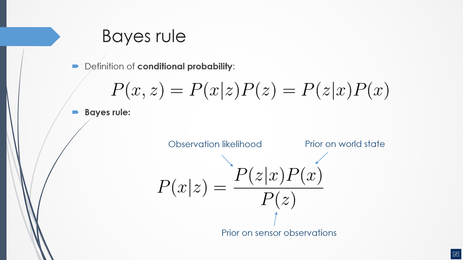
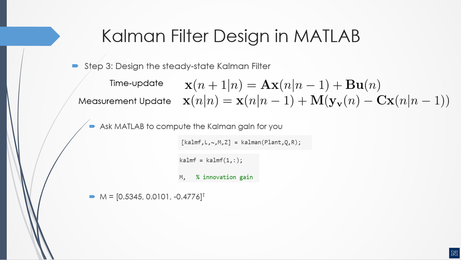
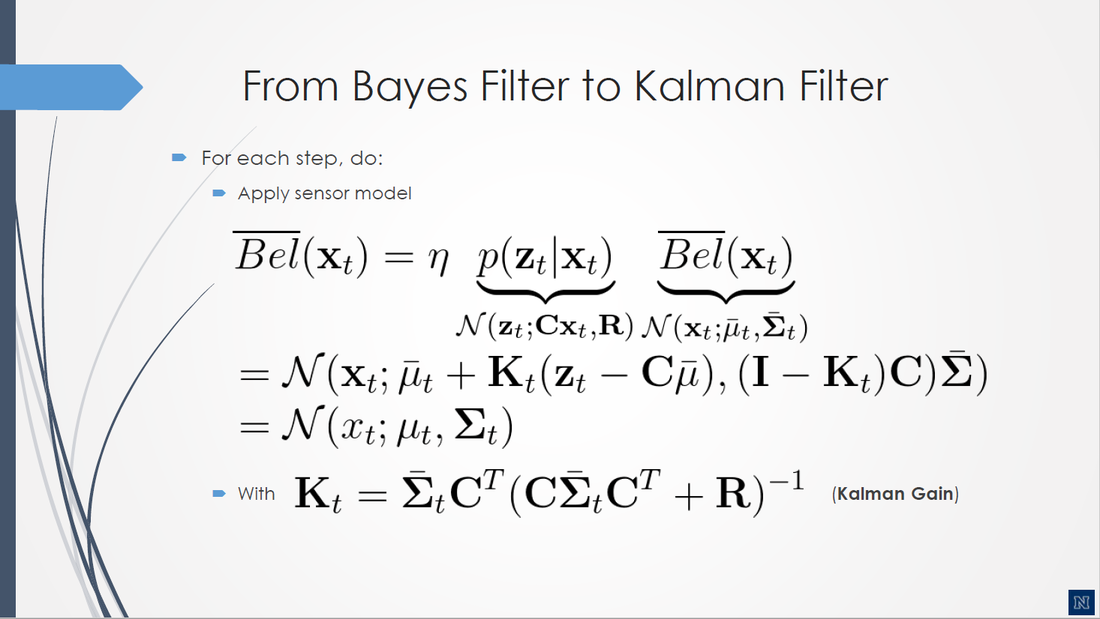
Contains recap of theory of probabilities, Bayes filter and the Kalman Filter.
Python LQR Implementation: click here

Additional material for Flight Control Systems:
Further examples from online resources:
|