Autonomous Teamed Exploration Path Planning
|
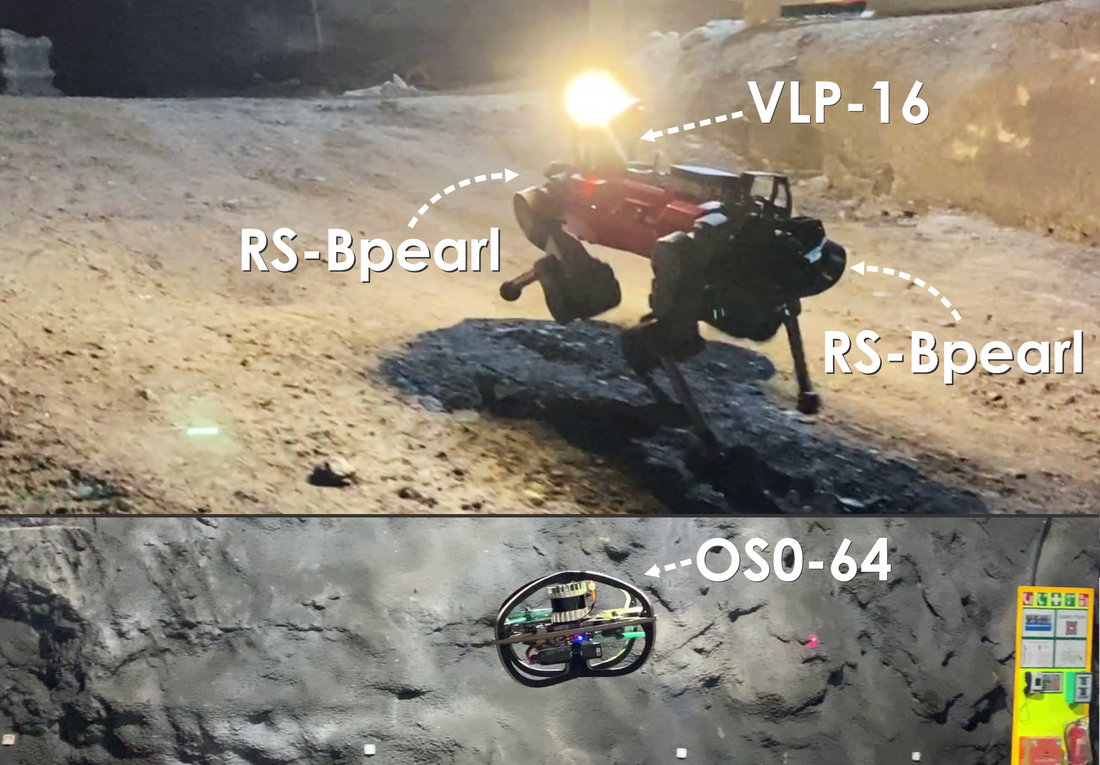
Abstract: This paper presents a novel strategy for autonomous teamed exploration of subterranean environments using legged and aerial robots. Tailored to the fact that underground environments, such as cave networks and underground mines, often involve complex, large-scale and multi-branched topologies, while establishing a persistent communications network may not be possible, this work is structured around the synergy of an onboard exploration path planner that allows for resilient long-term autonomy, and a centralized multi-robot coordination framework. The onboard path planner is unified across legged and flying robots and enables navigation in environments with steep slopes, and diverse geometries. When a communication link is available, each robot of the team shares submaps to a centralized location where a multi-robot coordination framework identifies global frontiers of the exploration space to best inform each system where it should re-position to best continue its mission. The proposed strategy is verified through a field deployment inside an underground mine in Switzerland using a legged and a flying robot collectively exploring for more than $45\textrm{min}$, as well as a longer simulation study involving three systems.
|
|
DARPA Subterranean Challenge Winning Method!
|
The presented path planning method was successfully deployed by Team CERBERUS in the DARPA Subterranean Challenge. It guided our exploration in the Finals Prize Run and thus contributed into our team getting the 1st place in the competition! We are excited for this achievement, and we are thus now accelerating the open-source release of the method *as used in the competition* to the benefit of the community. Below we also provide the video of prize run of Team CERBERUS as released by DARPA.
|
|
Publication
Under Review
Video Results
|
Main Demonstration Video
|
DARPA Subterranean Challenge Prize Run (guided by GBPlanner2)
|
|
|
|
Video Explanations
|
|
|
|
Additional Simulation Studies
|
|
|
Open-Source Code
Dataset
Coming soon.