Graph-based Subterranean Exploration Path Planning using Aerial and Legged Robots
Tung Dang1, Marco Tranzatto2, Shehryar Khattak1, Frank Mascarich1, Kostas Alexis1, Marco Hutter2
1 Autonomous Robots Lab, University of Nevada, Reno
2 Robotic Systems Lab, ETH Zurich
2 Robotic Systems Lab, ETH Zurich
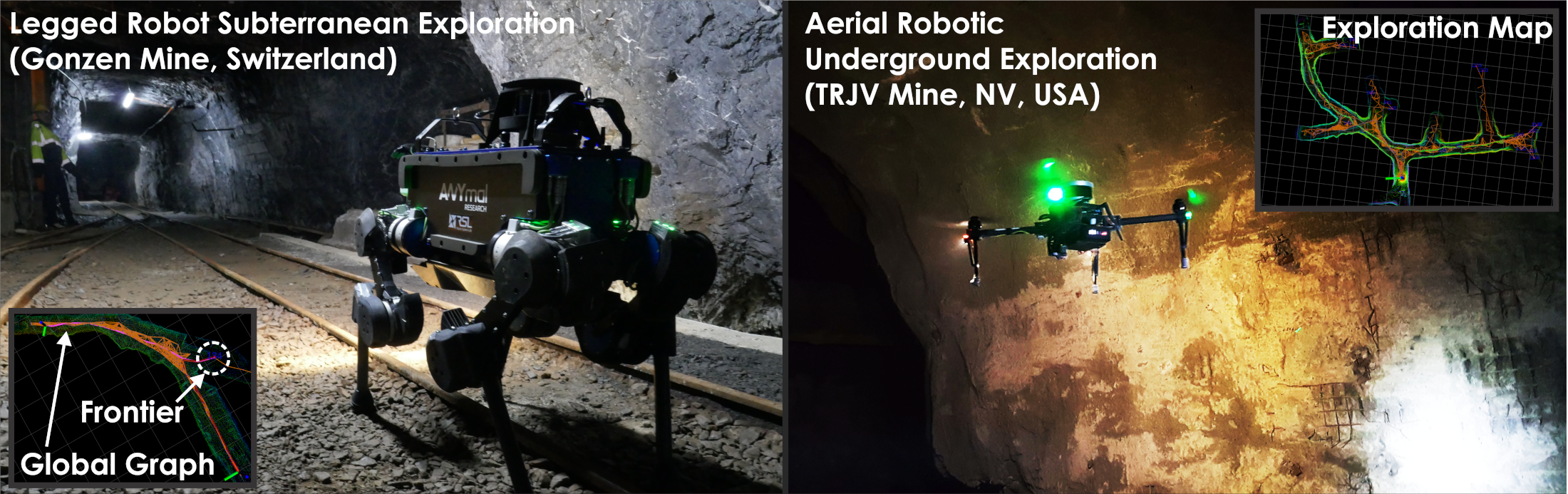
Abstract: Autonomous exploration of subterranean environments corresponds to a major challenge for robotic systems. In response to this fact, this paper contributes a novel graph-based subterranean exploration path planning method that is attuned to key topological properties of subterranean settings, including the fact that such environments often involve large-scale networks of tunnel-like and multi-branched topologies. Designed both for aerial and legged robots, the proposed method is structured around a bifurcated local- and global-planner architecture. The local planner utilizes a rapidly-exploring random graph to reliably and efficiently identify paths that optimize an exploration gain within a local subspace, while simultaneously avoiding obstacles, respecting applicable traversability constraints and honoring dynamic limitations of the robots. Reflecting the fact that multi-branched and tunnel-like networks of underground environments can often lead to dead-ends and accounting for the robot endurance, the global planning layer works in conjunction with the local planner to incrementally build a sparse global graph and is engaged when the system must be re-positioned to a previously identified frontier of the exploration space, or when a return-to-home path must be commanded. The designed planner is detailed with respect to its computational complexity and compared against state-of-the-art approaches. Emphasizing on field experimentation, the method is evaluated within multiple real-life deployments using aerial robots and the ANYmal legged system inside both long-wall and room-and-pillar underground mines in the U.S. and Switzerland, as well as inside an underground bunker. The presented results further include missions conducted within the DARPA Subterranean Challenge, a relevant competition on underground exploration.
Publication
Under Review
Video Results
|
Indicative Underground Mine Aerial Robotic Exploration
|
Indicative Underground Mine Legged Robot Exploration
|
Code
Dataset
Datasets for Subterranean Exploration
Relevant Downloads
- Aerial Robotic Exploration of TRJV mine [link]
- Aerial Robotic Exploration during the Tunnel Circuit of the DARPA Subterranean Challenge [link]
- Aerial Robotic Exploration of the Wampum Room-and-Pillar mine [link]
- ANYmal Exploration of Edgar mine [link-planner, link-camera]