Group: Senior Researchers: Dr. Sotirios Diamantas
Senior Researchers

|
Dr. Sotirios Diamantas - Dr. Diamantas is a senior postdoctoral researcher at our lab and has a leading scientific and student-guidance role in our research efforts in the fields of computer vision, autonomous driving and machine learning. Dr. Diamantas obtained his PhD by the University of Southampton, UK in the field of biological and metric maps applied to the problem of robot homing. Dr. Diamantas further has extensive leadership experience within multiple European projects.
|
Students Projects directly supervised by Dr. Diamantas
|
Gust-robust Unmanned Aerial Vehicles
Project Description: The past few years there has been an immense increase in the use of Unmanned Aerial Vehicles (UAVs). In spite of this enormous success UAVs are susceptible to harsh conditions, i.e., high winds; given their light weight and low thrust power, the majority of UAVs can operate under ideal weather conditions. In this project we want to exploit the potentials of visual modality and inertial measurements with the view to design and develop a robust UAV for flying in high winds and gusts. The UAV will fuse data from several sensors to provide enhanced stability and control. Ideally, the UAV will be learning from its past experience/sensor readings with the view to reinforce its flying attitude. This is a rather unexplored field in the flying robotics science and the prospects for further study is feasible. |

|
|
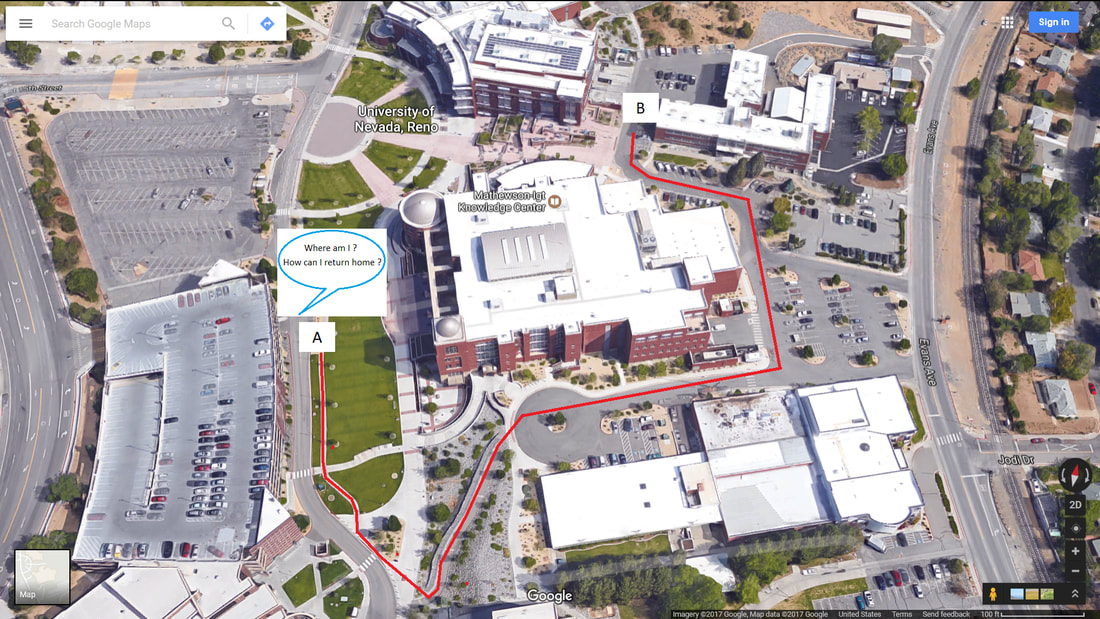
Kidnapped Robot Problem
Project Description: In 2009 a team from MIT won a DARPA competition to locate 10 eight-foot-wide red weather balloons scattered across the United States. The team from MIT discovered the locations of the balloons and was able to win the challenge in less than 9 hours by making use of crowdsourcing and social networking. At the heart of mobile robotics research lies the localization problem, an integral component of robot navigation. The kidnapped robot problem in robotics science refers to the problem where a robot knows nothing about where it is located, it has no maps of its surroundings and, hence, cannot plan a path to its home position. In this problem the robot reasons itself as to where it is and how it can return to its home position using an optimal route. For tackling this problem we will be making use of the potentials of crowdsourcing and geo-reference tagging to drive the robot to its home position. |
|
|
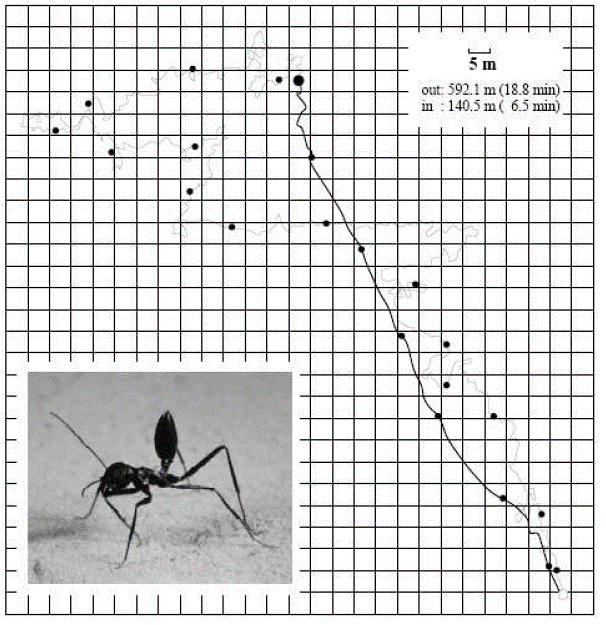
Robot Homing in GPS-denied Environments
Project Description: The past decade has seen an increase in interest in biologically-inspired robotics due to the advances both in the fields of neuroscience and biology as well as robotics. Several research groups around the world have focused their research on the development of robots inspired by biology with the view to build efficient robots that navigate, find their path, recognize objects, and localize efficiently. Honeybees and ants are able to return to its home position using a home-vector which is guided by path integration. No matter how circuitous is their outward path they are able to follow a direct path to their home. Even if the insects are displaced they are able to follow the same home-vector (with the same orientation and distance) as if they had not been displaced. The study of biology and robotics has a twofold gain; not only better and more robust robotic systems are being built but also we have been able to understand better the mechanisms that underlie biological organisms. In this -research- project we aim to identify the main biological models and implement them on a real robotic platform, be it a UAV or UGV with the goal to return the robot to its home position (robot homing problem), a core problem in robotics science that has received the attention of a plethora of researchers around the world. Our plan is to assess and evaluate the performance of the various biological models and compare them with traditional approaches to robot homing. |
|
Who We Are |
We are the Autonomous Robots Lab. We are striving for advanced long-term autonomy for ubiquitous robots in the real world!
|